漏れ検出
パイプライン リーク検出 液体と気体を含むシステムで漏れが発生したかどうか、また場合によっては発生した場所を判断するために使用されます。 検出方法には、パイプライン建設後の水圧試験や使用中の漏れ検出が含まれます。
パイプライン ネットワークは、石油、ガス、その他の流体製品の最も経済的で安全な輸送手段です。 長距離輸送の手段として、パイプラインは安全性、信頼性、効率性に対する高い要求を満たす必要があります。 適切にメンテナンスされていれば、パイプラインは漏れなく無期限に使用できます。 実際に発生する重大な漏水のほとんどは、近くの掘削設備の損傷によって引き起こされるため、掘削前に当局に連絡して、近くに埋設されたパイプラインがないことを確認することが重要です。 パイプラインが適切に維持されていない場合、特に建設接合部、湿気が集まる低い箇所、またはパイプ内に欠陥のある場所で、ゆっくりと腐食が始まる可能性があります。 ただし、これらの欠陥は検査ツールで特定し、漏れに至る前に修正できます。 漏れのその他の理由には、事故、地盤の動き、妨害行為などが含まれます。
漏れ検出システム (LDS) の主な目的は、パイプライン コントローラーによる漏れの検出と位置特定を支援することです。 LDS は、意思決定を支援するためにパイプライン コントローラーにアラームを提供し、その他の関連データを表示します。 パイプライン漏れ検出システムは、ダウンタイムと検査時間の短縮により生産性とシステムの信頼性を向上できるため、有益でもあります。 したがって、LDS はパイプライン テクノロジーの重要な側面です。
API ドキュメント「RP 1130」によれば、LDS は内部ベースの LDS と外部ベースの LDS に分けられます。 内部ベースのシステムは、フィールド計装 (流量、圧力、流体温度センサーなど) を利用して内部パイプライン パラメーターを監視します。 外部ベースのシステムでは、フィールド機器 (赤外線放射計、サーマル カメラ、蒸気センサー、音響マイク、光ファイバー ケーブルなど) を利用して外部パイプライン パラメーターも監視します。
マルチメディアコンテストの詳細については、公式規約をご覧ください。
一部の国ではパイプラインの運用を正式に規制しています。
API RP 1130「液体の計算パイプライン監視」(米国)
この推奨プラクティス (RP) は、アルゴリズム アプローチを使用する LDS の設計、実装、テスト、運用に焦点を当てています。 この推奨プラクティスの目的は、パイプライン オペレーターが LDS の選択、実装、テスト、運用に関連する問題を特定できるように支援することです。 LDS は内部ベースと外部ベースに分類されます。 内部ベースのシステムは、フィールド計測器 (流量、圧力、流体温度など) を利用して内部パイプラインのパラメータを監視します。 これらのパイプライン パラメーターは、その後、リークを推測するために使用されます。 外部ベースのシステムは、ローカルの専用センサーを使用します。
TRFL(ドイツ)
TRFL は、「Technische Regel für Fernleitungsanlagen」(パイプライン システムの技術規則)の略称です。 TRFL は、公式規制の対象となるパイプラインの要件をまとめています。 可燃性液体を輸送するパイプライン、水にとって危険な液体を輸送するパイプライン、およびガスを輸送するほとんどのパイプラインが対象となります。 XNUMX つの異なる種類の LDS または LDS 関数が必要です。
- 定常状態動作中の継続的なリーク検出のための XNUMX つの独立した LDS。 これらのシステムの XNUMX つまたは追加のシステムは、パイプラインの始動時などの過渡動作中の漏れを検出できなければなりません。
- シャットイン動作中の漏れ検出用の XNUMX つの LDS
- クリープリーク用の LDS XNUMX つ
- XNUMX つの LDS で漏れの位置を迅速に特定
要件
API 1155 (API RP 1130 に置き換えられました) は、LDS の次の重要な要件を定義します。
- 感度: LDS は、漏れによる液体の損失が可能な限り小さいことを保証する必要があります。 これにより、システムには XNUMX つの要件が課せられます。それは、小さな漏れを検出することと、迅速に検出することです。
- 信頼性: ユーザーは LDS を信頼できなければなりません。 これは、実際のアラームを正しく報告する必要があることを意味しますが、誤ったアラームを生成しないことも同様に重要です。
- 精度: 一部の LDS は、リーク流量とリーク位置を計算できます。 これは正確に行う必要があります。
- 堅牢性: LDS は、理想的でない状況でも動作し続ける必要があります。 たとえば、トランスデューサに障害が発生した場合、システムは障害を検出し、動作を継続する必要があります (感度の低下など、必要な妥協を伴う可能性があります)。
定常状態と過渡状態
定常状態では、パイプライン内の流量、圧力などは時間の経過とともに(ほぼ)一定です。 過渡状態では、これらの変数は急速に変化する可能性があります。 変化は、流体の音速でパイプラインを通って波のように伝播します。 過渡状態は、パイプラインの起動時、入口または出口の圧力が変化した場合(変化が小さい場合でも)、バッチが変更された場合、または複数の製品がパイプライン内にある場合などに発生します。 ガスは非常に圧縮性が高いため、ガスパイプラインはほとんど常に過渡状態にあります。 液体パイプラインであっても、ほとんどの場合、過渡的な影響を無視できません。 LDS では、パイプラインの動作時間全体にわたって漏れを検出できるように、両方の条件での漏れを検出できるようにする必要があります。
内部ベースの LDS
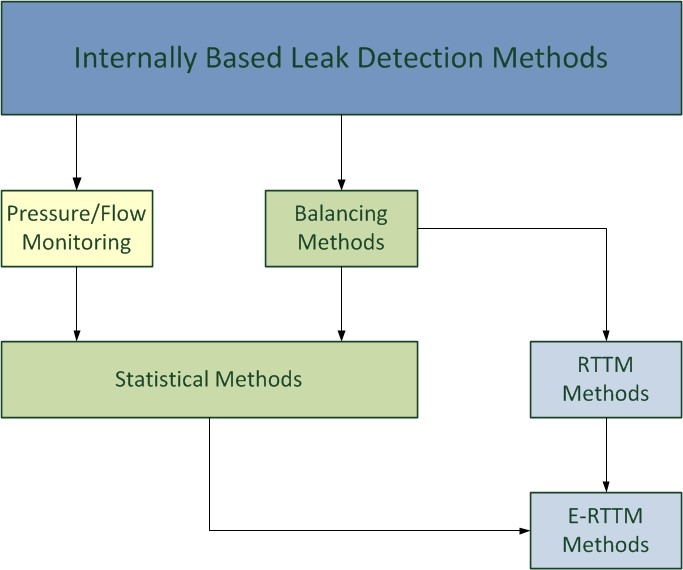
内部ベースのシステムは、フィールド計測器 (流量、圧力、流体温度など) を利用して内部パイプラインのパラメータを監視します。 これらのパイプライン パラメーターは、その後、リークを推測するために使用されます。 内部ベースの LDS は既存のフィールド計測器を使用するため、システムのコストと複雑さは中程度です。 この種類の LDS は、標準の安全要件に使用されます。
圧力/流量監視
漏れが発生するとパイプラインの油圧が変化するため、しばらくすると圧力や流量の測定値が変化します。 したがって、XNUMX 点のみの圧力または流量をローカルに監視することで、簡単な漏れ検出が可能になります。 ローカルで実行されるため、原則としてテレメトリは必要ありません。 ただし、これは定常状態でのみ役に立ち、ガスパイプラインを処理できる能力は限られています。
音響圧力波
音圧波法は、漏洩時に発生する希薄化波を解析します。 パイプラインの壁が破壊されると、流体またはガスが高速ジェットの形で流出します。 これにより、パイプライン内を両方向に伝播する負の圧力波が生成され、検出および分析できます。 この方法の動作原理は、パイプラインの壁に導かれて音速で長距離を伝わるという圧力波の非常に重要な特性に基づいています。 圧力波の振幅は、漏れのサイズとともに増加します。 複雑な数学的アルゴリズムが圧力センサーからのデータを分析し、わずか数秒で 50 m (164 フィート) 未満の精度で漏れの位置を特定することができます。 実験データによると、この方法は直径 3 mm (0.1 インチ) 未満の漏れを検出し、業界で最も低い誤警報率 (年間 1 件未満) で動作することが示されています。
ただし、この方法では、最初の事象の後に進行中の漏れを検出することはできません。つまり、パイプラインの壁が破壊 (または破裂) した後、最初の圧力波は静まり、その後の圧力波は発生しません。 したがって、システムが漏れを検出できない場合(たとえば、ポンプ圧力の変化やバルブの切り替えなどの動作イベントによって引き起こされる過渡的な圧力波によって圧力波がマスクされたため)、システムは進行中の漏れを検出しません。
バランスをとる方法
これらの方法は質量保存の原理に基づいています。 定常状態では、質量流量は  漏れのないパイプラインに入ると、質量流量のバランスが取れます。
漏れのないパイプラインに入ると、質量流量のバランスが取れます。  それを放置する。 パイプラインから出る質量の低下(質量の不均衡)
それを放置する。 パイプラインから出る質量の低下(質量の不均衡)  ) は漏れを示します。 バランス方法の測定 & 流量計を使用して、最後に未知の真の漏れ流量の推定値である不均衡を計算します。 この不均衡 (通常、複数の期間にわたって監視されます) を漏れ警報しきい値と比較します。
) は漏れを示します。 バランス方法の測定 & 流量計を使用して、最後に未知の真の漏れ流量の推定値である不均衡を計算します。 この不均衡 (通常、複数の期間にわたって監視されます) を漏れ警報しきい値と比較します。  これが不均衡を監視すると、アラームが生成されます。 強化されたバランシング方法では、パイプラインの大量在庫の変化率もさらに考慮されます。 強化されたライン バランシング技術に使用される名前は、ボリューム バランス、修正ボリューム バランス、補償されたマス バランスです。
これが不均衡を監視すると、アラームが生成されます。 強化されたバランシング方法では、パイプラインの大量在庫の変化率もさらに考慮されます。 強化されたライン バランシング技術に使用される名前は、ボリューム バランス、修正ボリューム バランス、補償されたマス バランスです。
統計的手法
統計的 LDS は、漏れを検出するために、統計的手法 (たとえば、決定理論の分野) を使用して、一点のみの圧力/流量または不均衡を分析します。 これにより、いくつかの統計的仮定が当てはまれば、リークの決定を最適化する機会が得られます。 一般的なアプローチは、仮説検定手順を使用することです。


これは古典的な検出問題であり、統計から知られているさまざまな解決策があります。
RTTM 手法
RTTM は「リアルタイム過渡モデル」を意味します。 RTTM LDS は、質量保存、運動量保存、エネルギー保存などの基本的な物理法則を使用したパイプライン内の流れの数学的モデルを使用します。 RTTM 法は、運動量とエネルギーの保存原理を追加で使用するため、バランシング法の強化版と見なすことができます。 RTTM を使用すると、数学的アルゴリズムを利用して、パイプラインに沿ったあらゆる点での質量流量、圧力、密度、温度をリアルタイムで計算できます。 RTTM LDS は、パイプライン内の定常状態の流れと過渡状態の流れを簡単にモデル化できます。 RTTM テクノロジーを使用すると、定常状態および過渡状態での漏れを検出できます。 機器が適切に機能していれば、利用可能な公式を使用して漏れ率を関数的に推定できます。
E-RTTM法
E-RTTM は「Extended Real-Time Transient Model」の略で、統計手法を備えた RTTM テクノロジーを使用します。 したがって、定常状態および過渡状態において高感度で漏れ検出が可能であり、統計的手法を使用して誤警報が回避されます。
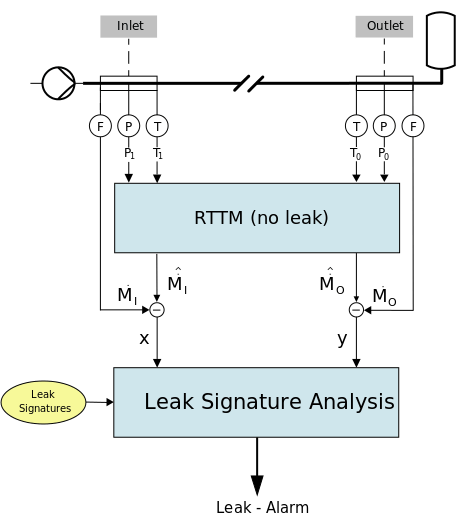
残差法の場合、RTTM モジュールが推定値を計算します。  ,
,  それぞれ入口と出口の MASS FLOW を表します。 これは、次の測定値を使用して行うことができます。 圧力 および入口温度 (
それぞれ入口と出口の MASS FLOW を表します。 これは、次の測定値を使用して行うことができます。 圧力 および入口温度 ( ,
,  ) とコンセント (
) とコンセント ( ,
,  )。 これらの推定質量流量は、測定された質量流量と比較されます。 , 、残差を生成します
)。 これらの推定質量流量は、測定された質量流量と比較されます。 , 、残差を生成します  &
&  。 漏れがなければ、これらの残差はゼロに近くなります。 それ以外の場合、残差は特徴的なシグネチャを示します。 次のステップでは、残差がリーク署名分析の対象になります。 このモジュールは、リーク シグネチャを抽出し、データベース内のリーク シグネチャ (「フィンガープリント」) と比較することにより、その時間的動作を分析します。 抽出された漏れの署名が指紋と一致する場合、漏れアラームが宣言されます。
。 漏れがなければ、これらの残差はゼロに近くなります。 それ以外の場合、残差は特徴的なシグネチャを示します。 次のステップでは、残差がリーク署名分析の対象になります。 このモジュールは、リーク シグネチャを抽出し、データベース内のリーク シグネチャ (「フィンガープリント」) と比較することにより、その時間的動作を分析します。 抽出された漏れの署名が指紋と一致する場合、漏れアラームが宣言されます。
外部ベースの LDS
外部ベースのシステムは、ローカルの専用センサーを使用します。 このような LDS は高感度で正確ですが、通常、システムのコストと設置の複雑さが非常に高くなります。 したがって、用途は、河川や自然保護地域の近くなど、特別な危険性の高い地域に限定されます。
デジタル油漏れ検知ケーブル
デジタル センス ケーブルは、透過性の絶縁成型編組で保護された半透過性の内部導体の編組で構成されています。 電気信号は内部導体を通過し、ケーブル コネクタ内の内蔵マイクロプロセッサによって監視されます。 漏れた流体は外部の透過性編組を通過し、内部の半透性導体と接触します。 これにより、ケーブルの電気的特性に変化が生じ、それがマイクロプロセッサによって検出されます。 マイクロプロセッサは、流体の長さに沿って 1 メートル以内の分解能で流体の位置を特定し、監視システムまたはオペレータに適切な信号を提供します。 センスケーブルは、パイプラインに巻き付けたり、パイプラインのある地下に埋め込んだり、パイプインパイプ構成として設置したりできます。
赤外線放射測定パイプラインテスト
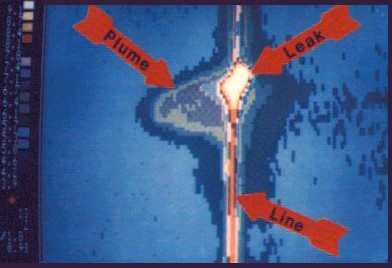
赤外線サーモグラフィーによるパイプライン検査は、地下のパイプラインの漏れ、浸食による空隙、パイプラインの断熱材の劣化、埋め戻し不良などを検出して位置を特定するのに正確かつ効率的であることが証明されています。 パイプラインの漏れにより、水などの流体がパイプラインの近くでプルームを形成すると、その流体の熱伝導率は乾燥した土壌や埋め戻しとは異なります。 これは、漏れ箇所の上のさまざまな表面温度パターンに反映されます。 高解像度の赤外線放射計を使用すると、領域全体をスキャンし、その結果得られたデータを、白黒画像の異なるグレートーン、またはカラー画像のさまざまな色で指定された異なる温度の領域を含む画像として表示できます。 このシステムは表面エネルギー パターンのみを測定しますが、埋設されたパイプラインの上の地表面で測定されるパターンは、パイプラインの漏れとその結果生じる浸食ボイドの形成場所を示すのに役立ちます。 地表から 30 メートルほどの深さの問題を検出します。
音響放射検出器
液体が漏れ出すと、パイプの穴を通過するときに音響信号が発生します。 パイプラインの外側に取り付けられた音響センサーは、損傷していない状態のパイプラインの内部ノイズからラインのベースライン音響「指紋」を作成します。 漏れが発生すると、その結果発生する低周波音響信号が検出され、分析されます。 ベースラインの「フィンガープリント」からの逸脱は、警報を発します。 現在、センサーは周波数帯域の選択、時間遅延範囲の選択などにより適切に配置されています。これにより、グラフがより明確になり、分析が容易になります。漏れを検出する方法は他にもあります。 フィルタ配置を備えた地上ジオフォンは、漏洩場所を正確に特定するのに非常に役立ちます。 掘削費用を節約できます。 土壌中のウォータージェットが土壌やコンクリートの内壁に衝突します。 微弱なノイズが発生します。 このノイズは表面に現れる間に減衰します。 ただし、最大の音を拾えるのは漏れ位置の上だけです。 アンプとフィルターはクリアなノイズを得るのに役立ちます。 パイプラインに入った一部の種類のガスは、パイプから出るときにさまざまな音を発生します。
蒸気感知管
蒸気感知チューブの漏れ検出方法では、パイプラインの全長に沿ってチューブを設置します。 このチューブはケーブル形式であり、特定の用途で検出される物質に対して高い透過性を持っています。 漏れが発生すると、測定対象物質が蒸気、ガス、または水に溶けた状態でチューブに接触します。 漏れが発生した場合、漏れた物質の一部がチューブ内に拡散します。 一定の時間が経過すると、チューブの内部でチューブの周囲の物質の正確な画像が生成されます。 センサーチューブ内に存在する濃度分布を分析するために、ポンプはセンサーチューブ内の空気柱を一定速度で検出ユニットを通過させます。 センサーチューブ先端の検知部にはガスセンサーが装備されています。 ガス濃度が増加するたびに、顕著な「リークピーク」が発生します。
光ファイバーの漏れ検出
分散型温度センシング (DTS) と分散型音響センシング (DAS) という、少なくとも XNUMX つの光ファイバーによる漏れ検出方法が商用化されています。 DTS 方式では、監視対象のパイプラインの長さに沿って光ファイバー ケーブルを設置します。 漏れが発生すると、測定対象の物質がケーブルに接触し、ケーブルの温度が変化し、レーザービームパルスの反射が変化し、漏れを知らせます。 レーザーパルスが放射されてから反射が検出されるまでの時間遅延を測定することで、位置がわかります。 これは、物質が周囲環境とは異なる温度にある場合にのみ機能します。 さらに、分散型光ファイバー温度検知技術により、パイプラインに沿った温度を測定できる可能性があります。 ファイバーの全長をスキャンすることで、ファイバーに沿った温度プロファイルが測定され、漏れの検出につながります。
DAS 方式では、監視対象のパイプラインの長さに沿って同様に光ファイバー ケーブルを設置します。 漏れを介してパイプラインから出る物質によって引き起こされる振動は、レーザービームパルスの反射を変化させ、漏れを知らせます。 レーザーパルスが放射されてから反射が検出されるまでの時間遅延を測定することで、位置がわかります。 この技術を分散温度センシング方法と組み合わせて、パイプラインの温度プロファイルを提供することもできます。